





Apr 09, 2006
Cognews: navigation skills used in robots
From Cognews
How does the ant, without maps and satellite naviation, make regular trips home without getting lost? Dr Markus Knaden, from the University of Zurich, reports that a visit back to the nest is essential for ants to reset their navigation equipment and avoid getting lost on foraging trips. "Knowledge about path integration and landmark learning gained from our experiments with ants has already been incorporated in autonomous robots. Including a 'reset' of the path integrator at a significant position could make the orientation of the robot even more reliable", says Dr Knaden who spoke on Tuesday 4th April at the Society for Experimental Biology's Main Annual Meeting in Canterbury, Kent. ...
20:24 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Apr 06, 2006
Will machines ever really think?
Developments in robotics and artificial intelligence raise a natural question: If computer processing eventually apes nature's neural networks, will cold silicon ever be truly able to think? And how will we judge whether it does?
Journalist Yvonne Raley addresses these issues in this article just appeared in the online issue of Scientific American Mind
19:25 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Mar 15, 2006
Robot for the Edlerly
Via Gear Factor
Japanese researchers are developing a robot, RI-MAN, which will provide assistance to the elderly. RI-MAN is 5-foot-tall, and weights 220-pound. A layer of soft silicone allows it to lift patients into its arms. Moreover, built-in sensors detect a person's body position and weight, so the robot can figure out how best to lift them. At the moment, RI-MAN can only carry a 26-pound doll, but could be capable of lifting a 150-pound person within five years.

21:27 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Mar 08, 2006
postdoc positions in cognitive/emotional robotics
Via Humaine
Two postdoc positions in cognitive/emotional robotics are available at the University of Skövde, Sweden.
These positions are part of the four-year European integrated project "Integrating Cognition, Emotion and Autonomy" (ICEA, Jan 2006 - Dec 2009). The project involves cognitive scientists, neuroscientists, psychologists, computer scientists, and roboticists, and aims to develop a cognitive systems architecture integrating cognitive, emotional and autonomic/bioregulatory processes in the control of robotic cognitive systems.
The two postdoc positions are focused on developing robotic/neural net models of (1) the role of anticipation, representation and emotion in agent-environment interaction, (2) the interaction between cognitive and emotional mechanisms. The application deadlines are March 20 and April 18, respectively.
For further information and detailed application instructions see:
* position 1 (deadline March 20)
http://www.career.edu/index.php?post_id=1081
http://www.his.se/templates/vanligwebbsida1.aspx?id=24698
* position 2 (deadline April 18)
http://www.career.edu/index.php?post_id=1105
http://www.his.se/templates/vanligwebbsida1.aspx?id=24811
Starting date (for both positions): spring/summer 2006 (as soon as possible).
Informal enquiries about the positions can be directed to Tom Ziemke at tom.ziemke@his.se.
15:56 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Feb 23, 2006
Fourth Workshop on Agents Applied in Health Care
A workshop held in conjunction with the ">17th European Conference on Artificial Intelligence, ECAI-2006
Riva del Garda, Italy, August 28th - September 1st, 2006
April 1st, 2006: Deadline for paper and demos submission
From the workshop website:
Multi-agent systems are one of the most exciting research areas in Artificial Intelligence. In the last eight years there has been a growing interest in the application of agent-based systems in health care. The first specialised workshop on this area was held at Autonomous Agents '2000 in Barcelona, Spain; several other workshops and special issues of journals have followed since then (ECAI-2002, Agentcities ID3-2003, ECAI-2004 and IJCAI-05). Moreover, a growing European community of researchers interested in the application of intelligent agents in health care emerged as a result of the activities within the AgentCities.NET European network and the AgentLink III Technical Forum Group on Healthcare Applications of Intelligent Agents. Thus, it may now be a good time for the specialists in the field to meet and report on the results achieved in this area, to discuss the benefits (and drawbacks) that agent-based systems may bring to medical domains, and also to provide a list of the research topics that should be tackled in the near future to make the deployment of health-care agent-based systems a reality.
Current topics of research include communication and co-operation between distributed intelligent agents to manage patient care, information agents that retrieve medical information from the Internet, and multi-agent systems that assist the doctors in the tasks of monitoring and diagnosis. A lot of methodological and technical problems are beginning to be discovered by the researchers that attempt to deploy agent-based systems in the medical area; just to name a few, there does not exist a universally accepted standard medical ontology, it is difficult to integrate new agent systems with legacy software, and these new agent-based systems should take into account rapidly changing national and international laws and regulations concerning the privacy of medical data and the security of the transaction of patient information between agents.
This one-day workshop will feature some of the following activities:
- Presentation of state-of-the-art papers with the latest developments in the field.
- Presentation of review-style papers.
- Demos of practical applications of MAS in health care.
- Panel discussion of the main problems that have to be faced to deploy real agent-based health-care applications.
- Time for meeting colleagues in the field and discussing possible future collaborations.
11:13 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Feb 08, 2006
Dynamical Principles for Neuroscience and Intelligent Biomimetic Devices
March, 8-10, 2006, (Registration deadline: February 13 !) Ecole Polytechnique Fédérale de Lausanne (EPFL), Switzerland
Aim of the Conference
The goal of the conference is to bring together scientists and engineers interested in understanding the dynamical properties of the nervous system, and in taking inspiration from those properties for the design of prosthetic and robotic devices. The conference is interdisciplinary in nature, and aims at bringing together researchers working on similar topics and phenomena but from different backgrounds.
The conference is made possible thanks to the generous support of the Latsis Foundation. The presentations will consists of a series of invited talks (see below) and of poster presentations (with short poster spotlights).
For more background on the aim of the conference, please visit latsis2006.epfl.ch
Registration
------------
Registration for the EPFL-LATSIS Symposium 2006 is open. Please visit the website for information and registration form
15:26 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Feb 02, 2006
New Scientist: special on robotic
The journal New Scientist proposes a special report focusing on robots that have the ability to mimic or model specific aspects of human behavior.
12:35 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Jan 16, 2006
Khepera is a smart guy
Via smart mobs

Ifomind was awarded the British Computer Society prize for machine intelligence
From the press release
IFOMIND reacts initially in an 'instinctive' way to its first perception of an unknown object that it encounters; at first it is generally fearful. However, because the robot is equipped with a human-like capability of inquisitiveness, it realises that it can react in another way and does not have to be scared of something that may not be harmful to it. So, the robot observes the object from a distance and takes note of how it behaves and how it reacts to different approaches; the robot is then able to decide on the best approach– or whether to avoid it. This knowledge can then be retained by the robot as it carries on and meets many more objects. This is a remarkable leap forward in the domain of Machine Intelligence as IFOMIND is able to use logical thought processes in order to decide the best way to interact with the objects that it meets. The implications of this are huge, for example as David Bell from the IFOMIND team explains, "A system that can observe events in an unknown scenario, learn and participate as a child would is a major challenge in AI. We have not achieved this, but we think we've made a small advance." - David Bell
20:33 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology
Jan 03, 2006
Can robot demonstrate self-awareness?

According to Junichi Takeno and his co-workers, the ground-breaking technology could eventually lead to robots able to express emotions.
Read full story
14:55 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, Robotics
Dec 22, 2005
Practicing medicine on robo-patients
23:00 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Dec 06, 2005
Robo-patients Allow Medical Students To Practise Until Perfect
via Science Daily
Robotic, simulated patients are allowing students in the Michael G. DeGroote School of Medicine to practise clinical skills before they reach human patients. A simulator lab training centre set up by the anesthesia department allows students to experience the challenges of working in a hospital operating room in a setting that looks and functions as close as possible to the real thing...
Read full article
21:35 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Uncanny valley
From Wikipedia
The Uncanny Valley is a principle of robotics concerning the emotional response of humans to robots and other non-human entities. It was theorized by Japanese roboticist Masahiro Mori in 1970. The principle states that as a robot is made more humanlike in its appearance and motion, the emotional response from a human being to robot will become increasingly positive and empathic, until a point is reached at which the response suddenly becomes strongly repulsive; as the appearance and motion are made to be indistinguishable to that of human being, the emotional response becomes positive once more and approaches human-human empathy levels.

Emotional response of human subjects is plotted against anthropomorphism of a robot, following Mori's results. The Uncanny Valley is the region of negative emotional response for robots that seem "almost human".
This gap of repulsive response aroused by a robot with appearance and motion between a "barely-human" and "fully human" entity is called the Uncanny Valley. The name harkens to the notion that a robot which is "almost human" will seem overly "strange" to a human being and thus will fail to evoke the requisite empathetic response required for productive human-robot interaction.
 The phenomenon can be explained by the notion that if an entity is sufficiently non-humanlike, then the humanlike characteristics will tend to stand out and be noticed easily, generating empathy. On the other hand, if the entity is "almost human", then the non-human characteristics will be the ones that stand out, leading to a feeling of "strangeness" in the human viewer.
The phenomenon can be explained by the notion that if an entity is sufficiently non-humanlike, then the humanlike characteristics will tend to stand out and be noticed easily, generating empathy. On the other hand, if the entity is "almost human", then the non-human characteristics will be the ones that stand out, leading to a feeling of "strangeness" in the human viewer.
Another possibility is that infected individuals and corpses exhibit many visual anomalies similar to the ones we see with humanoid robots and so we react with the same alarm and revulsion. The reaction may in fact become worse with robots since there is no overt reason for it to occur; when we see a corpse we understand where our feelings come from. Behavioural anomalies too are indicative of illness, neurological conditions or mental dysfunction, and again evoke acutely negative emotions.
Some roboticists have heavily criticized the theory, arguing that Mori had no basis for the right part of his chart, as human-like robots are only now technically possible (and still only partially). David Hanson, a roboticist who developed a realistic robotic copy of his girlfriend's head, said the idea of the Uncanny Valley was "really pseudoscientific, but people treat it like it is science." Sara Kiesler, a human-robot interaction researcher at Carnegie Mellon University, questioned Uncanny Valley's scientific status, noting that "we have evidence that it’s true, and evidence that it’s not."
21:15 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Oct 25, 2005
Aibo to fight obesity
Via Medical Informatics Insider
 The canine robot would be able to monitor daily food intake and exercise levels and encourage overweight individuals to stick to their diets. The dog would be connected by radio to the bathroom scales, a pedometer and a personal organizer in which the owner would note his daily food intake.
The canine robot would be able to monitor daily food intake and exercise levels and encourage overweight individuals to stick to their diets. The dog would be connected by radio to the bathroom scales, a pedometer and a personal organizer in which the owner would note his daily food intake.More to explore
MIT Media LabAIBO, Sony
UbiComp
17:20 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Jul 18, 2005
Philips' iCat for studying human-robot interaction topics
Via Medgadget
Philips new invention iCat promises to advance the field of human-robot interaction. The robot can express a wide range of expressions, and elaborate the user's reactions to these expressions. The robot is about fourty cm tall and is equipped with a number of servos that control different components of the face, including mouth and head position. Moving these parts of the face, the robot can make many different facial expressions. Reseachers can observe the user's reaction to these expressions and investigate i.e. the perceived personality of the iCat during a game or task setting.

Philips researchers predict that the iCat could have applications in psychology research (social cognition) and in medicine, for example to help autistic children or stroke survivors.
More to explore
- the Philips Research Technologies web page
19:40 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Apr 13, 2005
Rescue Robots
Disaster rescue is one of the most serious social issues which involves very large numbers of heterogeneous agents in an hostile environment.
Rescue Robotics is a newly emerging field dealing with systems that support first response units in disaster missions. Especially mobile robots can be highly valuable tools in urban rescue missions after catastrophes like earthquakes, bomb- or gas-explosions or daily incidents like fires and road accidents involving hazardous materials. The robots can be used to inspect collapsed structures, to assess the situation and to search and locate victims.

There are many engineering and scientific challenges in this domain. Rescue robots not only have to be designed for the harsh environmental conditions of disasters, but they also need advanced capabilities like intelligent behaviors to free them from constant supervision by operators.

The main goal of the RoboCupRescue project is to promote research and development in this socially significant domain at various levels involving multi-agent team work coordination, physical robotic agents for search and rescue, information infrastructures, personal digital assistants, a standard simulator and decision support systems, evaluation benchmarks for rescue strategies and robotic systems that are all integrated into a comprehensive systems in future.
More to explore
The web site of RescueRobots Freiburg, one of the leading lab in the RR field
13:00 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics
Jan 01, 2005
Robocup Rescue
About Simulation League
The RoboCupRescue Simulation League competition is an international evaluation conference for the RoboCupRescue Simulation Project research.
The main purpose of the RoboCupRescue Simulation Project is to provide emergency decision support by integration of disaster information, prediction, planning, and human interface. A generic urban disaster simulation environment was constructed based on a computer network. Heterogeneous intelligent agents such as fire fighters, commanders, victims, volunteers, etc. conduct search and rescue activities in this virtual disaster world. Real-world interfaces such as helicopter images synchronizes the virtuality and the reality by sensing data. Mission-critical human interfaces such as PDA support disaster managers, disaster relief brigades, residents and volunteers decide their actions so as to minimize the disaster damage.
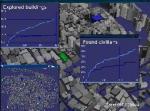
This problem introduces researchers advanced and interdisciplinary research themes. As AI/Robotics research, for example, behavior strategy (e.g. multi-agent planning, realtime/anytime planning, heterogeneity of agents, robust planning, mixed-initiative planning) is a challenging problem. For disaster researchers, RoboCupRescue works as a standard basis in order to develop practical comprehensive simulators adding necessary disaster modules.
18:40 Posted in AI & robotics | Permalink | Comments (0) | Tags: Positive Technology, robotics