





Oct 19, 2010
HRP-4C cybernetic human dance
Dance Robot LIVE! is a performance recently shown at the Digital Content Expo in Tokyo. The performance features AIST's feminine HRP-4C robot and four humans. The routine was produced by renowned dancer/choreographer SAM-san and the lip-synced song is a Vocaloid version of "Deatta Koro no Yō ni" by Kaori Mochida (Every Little Thing).
00:00 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics, hrp4c, dance
Sep 19, 2010
Artificial skin projects could restore feeling to wearers of prosthetic limbs
Via Telemedicine and E-Health news
Research groups at Stanford University and the University of California at Berkeley are developing sensor-based artificial skin that could provide prosthetic and robotic limbs with a realistic sense of touch. Stanford's project is based on organic electronics and is capable of detecting the weight of a fly upon the artificial skin, according to Zhenan Bao, professor of chemical engineering at Stanford.
The highly sensitive surfaces could also help robots pick up delicate objects without breaking them, improve surgeons' control over tools used for minimally invasive surgery, and increase efficiency of touch screen devices, she noted. Meanwhile, UC Berkeley's "e-skin" uses low-power, integrated arrays of nanowire transistors, according to UC Berkeley Professor of Electrical Engineering and Computer Science Ali Javey.
Thus far, the skin, the first ever made out of inorganic single crystalline semiconductors, is able to detect pressure equivalent to the touch of a keyboard. "It's a technique that can be potentially scaled up," said study lead author Kuniharu Takei, post-doctoral fellow in electrical engineering and computer sciences at UC Berkeley. "The limit now to the size of the e-skin we developed is the size of the processing tools we are using."
20:31 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial skin, prosthetic, robotics, touch
Jan 09, 2010
Photos: International Robot Exhibition 2009
Hundreds of robots have gathered at the International Robot Exhibition (IREX) held in November 2009 at Tokyo Big Sight. Here are a few photos from the event, collected by Pink Tentacle.
http://pinktentacle.com/2009/11/photos-international-robo...

12:54 Posted in Positive Technology events | Permalink | Comments (0) | Tags: robotics, positive technology events
Dec 08, 2009
FaceBots

The world's first robot with its own Facebook page (and that can use its information in conversations with "friends") has been developed by Nikolaos Mavridis and collaborators from the Interactive Robots and Media Lab at the United Arab Emirates University.
The main hypothesis of the FaceBots project is that long-term human robot interaction will benefit by reference to "shared memories" and "events relevant to shared friends" in human-robot dialogues.
More to explore:
-
N. Mavridis, W. Kazmi and P. Toulis, "Friends with Faces: How Social Networks Can Enhance Face Recognition and Vice Versa", contributed book chapter to Computational Social Networks Analysis: Trends, Tools and Research Advances, Springer Verlag, 2009. pdf
N. Mavridis, W. Kazmi, P. Toulis, C. Ben-AbdelKader, "On the synergies between online social networking, Face Recognition, and Interactive Robotics", CaSoN 2009. pdf
N. Mavridis, C. Datta et al, "Facebots: Social robots utilizing and publishing social information in Facebook", IEEE HRI 2009. pdf
22:41 Posted in AI & robotics, Social Media | Permalink | Comments (0) | Tags: robotics, artificial intelligence, social networks
Sep 25, 2009
Miruko Eyeball Robotic Eye
Via Pink Tentacle
Miruko is a camera robot in the shape of an eyeball capable of tracking objects and faces. Worn on the player’s sleeve, Miruko’s roving eye scans the surroundings in search of virtual monsters that are invisible to the naked human eye. When a virtual monster is spotted, the mechanical eyeball rolls around in its socket and fixes its gaze on the monster’s location. By following Miruko’s line of sight, the player is able to locate the virtual monster and “capture” it via his or her iPhone camera.
In this video, Miruko’s creators demonstrate how the robotic eyeball can be used as an interface for a virtual monster-hunting game played in a real-world environment.
According to its creators, Miruko can be used for augmented reality games, security, and navigation.
18:31 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics, iphone, augmented reality
Sep 21, 2009
HAL: New assistive walking device
Japanese company Cyberdyne, with the scientific support provided by Professor Sankai of Tsukuba University, have developed the Hybrid Assistive Limb - HAL - a device designed to help people walk or carry heavy loads. The assistive walking system weights 10 kilogram and has a battery at the back. Embedded sensors collects electric signals that are delivered to the brain through the skin surface. Thanks to these sensors, the system can help users to move in the direction they are thinking. The walking speed is 1.8 km p/h.
Watch the HAL in action in this video:
17:10 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics
Dec 04, 2007
Simroid
Via Pink Tentacle

Simroid is a robotic dental patient designed by Kokoro Company Ltd as a training tool for dentists.
The simulated patient can follow spoken instructions, closely monitor a dentist’s performance during mock treatments, and react in a human-like way to mouth pain thanks to mouth sensors.
08:37 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics, artificial intelligence
Oct 25, 2007
Japanese android recognizes and uses body language
Via Pink Tentacle

Japan’s National Institute of Information and Communications Technology (NICT) researchers have developed an autonomous humanoid robot that can recognize and use body language. According to the press release, the android can use nonverbal communication skills such as gestures and touch to facilitate natural interaction with humans. NICT researchers envision future applications of this technology in robots that can work in the home or assist with rescue operations when disaster strikes.
NICT press release (japanese)
22:45 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Oct 07, 2007
NIPS 2007 WORKSHOP: Robotics Challenges for Machine Learning
Dates: 7-8 December, 2007
Organizers:
Jan Peters (Max Planck Institute for Biological Cybernetics & USC), Marc Toussaint (Technical University of Berlin)
http://www.robot-learning.de
email: nips07@robot-learning.de
Acceptance Notification: October 26, 2007
22:12 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Oct 01, 2007
Oribotics

Part of the Melbourne International Arts FestivalOribotics [network] is a unique art and technology installation in the Atrium at Federation Square, drawing on cutting edge research in biology, computing, and scientific origami. Discover living biomimetic works attached to the glass panes of the Atrium’s Fracture Galleries.
Seek out Oribotics [network] and you will find robots rooted to the architecture, surviving on solar power, with their faceted folded mechanical blossoms attracting data, moving in response to the physical audience and stimuli from online users at www.oribotics.net. In Oribotics [network] each robot is individually connected to the vastness of the internet, and to local mobile phone, Bluetooth and wifi networks, enabling interaction via mobile devices and the web.
Bring your laptop, PDA, or mobile phone, start up your bluetooth and wifi connections and ‘network’ with the Oribots. Or point your browser to www.oribotics.net and explore the virtual world of the oribots digestion. Oribotics [network]Matthew Gardiner’s research into the hybrid art / science field that fuses the ancient art of origami with robotic technology. Witness the results of four years development of intricately folded designs integrated with robotic mechanisms. continues multimedia artist
This is the most complex generation of oribots to date. With support from Arts Victoria Innovation fund, we are powering ahead into new realms.
At the moment we are working with compact computers (about the size of a greeting card), Micro Linear Actuators, designing flowers from water bombs, and using some of the strongest sticky tape in the world… If all that sounds a little odd, then you’d better read the blog. - Matthew Gardiner
Oribotics.net is designed and coded by Matthew Gardiner & My Trinh Gardiner at http://www.airstrip.com.au.
22:26 Posted in AI & robotics, Cyberart | Permalink | Comments (0) | Tags: robotics, cyberart
Sep 20, 2007
Japanese seniors bored with robot
From Robot.net

According to a Reuters report, Japanese senior citizens quickly become bored with the simple robots so far introduced into nursing homes:
"The residents liked ifbot for about a month before they lost interest. Stuffed animals are more popular." Ifbot is a small robot that can converse, sing, express emotions, and even present trivia quizzes to senior citizens. According to the article the robot has spent most of the past year sitting in a corner, unused. Another robot, Hopis, that looked like a furry pink dog has gone out of production due to poor sales. Hopis was designed to monitor blood sugar, blood pressue, and body temperature. One problem may be that both robots are little more than advanced toys. Neither can help elderly people with day-to-day problems they face such as getting around their house, reading small print, or taking a bath. The elderly have found utilitarian improvements in existing devices more useful: height-adjustable countertops or extra-big control buttons on household gadgets. Whether seniors will find robots that can help with their utilitarian needs more to their liking than fluffy pupbots that sing remains to be seen"
21:25 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics, artificial intelligence
Sep 16, 2007
EU researchers implanted an artificial cerebellum inside a robot
Roland Piquepaille reports that "An international team of European researchers has implanted an artificial cerebellum - the portion of the brain that controls motor functions - inside a robotic system. This EU-funded project is dubbed SENSOPAC, an acronym for "SENSOrimotor structuring of perception and action for emerging cognition". One of the goals of this project is to design robots able to interact with humans in a natural way. This project, which should be completed at the end of 2009, also wants to produce robots which would act as home-helpers for disabled people, such as persons affected by neurological disorders, such as Parkinson's disease."
SENSOPAC website
22:39 Posted in AI & robotics | Permalink | Comments (0) | Tags: robotics, artificial intelligence
Sep 13, 2007
Telepresence robot for interpersonal communication with the elderly
Developing a Telepresence Robot for Interpersonal Communication with the Elderly in a Home Environment.
Telemed J E Health. 2007 Aug;13(4):407-424
Authors: Tsai TC, Hsu YL, Ma AI, King T, Wu CH
"Telepresence" is an interesting field that includes virtual reality implementations with human-system interfaces, communication technologies, and robotics. This paper describes the development of a telepresence robot called Telepresence Robot for Interpersonal Communication (TRIC) for the purpose of interpersonal communication with the elderly in a home environment. The main aim behind TRIC's development is to allow elderly populations to remain in their home environments, while loved ones and caregivers are able to maintain a higher level of communication and monitoring than via traditional methods. TRIC aims to be a low-cost, lightweight robot, which can be easily implemented in the home environment. Under this goal, decisions on the design elements included are discussed. In particular, the implementation of key autonomous behaviors in TRIC to increase the user's capability of projection of self and operation of the telepresence robot, in addition to increasing the interactive capability of the participant as a dialogist are emphasized. The technical development and integration of the modules in TRIC, as well as human factors considerations are then described. Preliminary functional tests show that new users were able to effectively navigate TRIC and easily locate visual targets. Finally the future developments of TRIC, especially the possibility of using TRIC for home tele-health monitoring and tele-homecare visits are discussed.
22:32 Posted in AI & robotics, Telepresence & virtual presence | Permalink | Comments (0) | Tags: robotics, artificial intelligence, telepresence
Jul 26, 2007
Halluc II: 8-legged robot vehicle
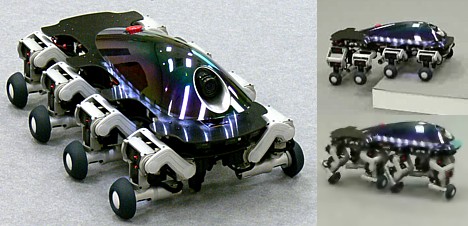
Researchers at the Chiba Institute of Technology have developed a robotic vehicle with eight wheels and legs designed to drive or walk over rugged terrain. The agile robot, which the developers aim to put into practical use within the next five years, can move sideways, turn around in place and drive or walk over a wide range of obstacles.
The researchers hope the robot’s abilities will help out with rescue operations, and they would like to see Halluc II’s technology put to use in transportation for the mobility-impaired.
Here’s a short video of the model in action.
19:05 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Jul 14, 2007
RunBot

Researchers from Germany and the United Kingdom have developed a bipedal walking robot, capable of self-stabilizing via a highly-developed learning process.
From the study abstract:
In this study we present a planar biped robot, which uses the design principle of nested loops to combine the self-stabilizing properties of its biomechanical design with several levels of neuronal control. Specifically, we show how to adapt control by including online learning mechanisms based on simulated synaptic plasticity. This robot can walk with a high speed (>3.0 leg length/s), self-adapting to minor disturbances, and reacting in a robust way to abruptly induced gait changes. At the same time, it can learn walking on different terrains, requiring only few learning experiences. This study shows that the tight coupling of physical with neuronal control, guided by sensory feedback from the walking pattern itself, combined with synaptic learning may be a way forward to better understand and solve coordination problems in other complex motor tasks.
The paper: Adaptive, Fast Walking in a Biped Robot under Neuronal Control and Learning (Manoonpong P, Geng T, Kulvicius T, Porr B, Worgotter F (2007) Adaptive, Fast Walking in a Biped Robot under Neuronal Control and Learning. PLoS Comput Biol 3(7): e134)
16:18 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Jul 11, 2007
Using a Robot to Teach Human Social Skills
Via KurzweilAI
A humanoid robot designed to teach autistic children social skills has begun testing in British schools. Known as KASPAR (Kinesics and Synchronisation in Personal Assistant Robotics), the $4.33 million bot smiles, simulates surprise and sadness
Read full article
21:26 Posted in AI & robotics, Cybertherapy | Permalink | Comments (0) | Tags: artificial intelligence, robotics, cybertherapy
Jul 06, 2007
Epigenetic Robotics 2007 (Extended Deadline)
Via NeuroBot
5-7 November 2007, Piscataway, NJ, USA
Seventh International Conference on Epigenetic Robotics: Modeling Cognitive Development in Robotic Systems
http://www.epigenetic-robotics.org
Email: epirob07@epigenetic-robotics.org
Location:
Rutgers, The State University of New Jersey,
Piscataway, NJ, USA
*Extended* Submission Deadline: 1 August 2007
16:16 Posted in AI & robotics, Call for papers | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Apr 29, 2007
First DARPA Limb Prototype
From the DARPA press release
(via Medgadget)

An international team led by the Johns Hopkins University Applied Physics Laboratory (APL) in Laurel, Md., has developed a prototype of the first fully integrated prosthetic arm that can be controlled naturally, provide sensory feedback and allows for eight degrees of freedom--a level of control far beyond the current state of the art for prosthetic limbs. Proto 1, developed for the Defense Advanced Research Projects Agency (DARPA) Revolutionizing Prosthetics Program, is a complete limb system that also includes a virtual environment used for patient training, clinical configuration, and to record limb movements and control signals during clinical investigations.
The DARPA prosthetics program is an ambitious effort to provide the most advanced medical and rehabilitative technologies for military personnel injured in the line of duty. Over the last year, the APL-led Revolutionizing Prosthetics 2009 (RP 2009) team has worked to develop a prosthetic arm that will restore significant function and sensory perception of the natural limb. Proto 1 and its virtual environment system were delivered to DARPA ahead of schedule, and Proto 1 was fitted for clinical evaluations conducted by team partners at the Rehabilitation Institute of Chicago (RIC) in January and February.
"This progress represents the first major step in a very challenging program that spans four years and involves more than 30 partners, including government agencies, universities, and private firms from the United States, Europe, and Canada," says APL's Stuart Harshbarger, who leads the program. "The development of this first prototype within the first year of this program is a remarkable accomplishment by a highly talented and motivated team and serves as validation that we will be able to implement DARPA's vision to provide, by 2009, a mechanical arm that closely mimics the properties and sensory perception of a biological limb."
APL, which was responsible for much of the design and fabrication of Proto 1, and other team members are already hard at work on a second prototype, expected to be unveiled in late summer. It will have more than 25 degrees of freedom and the strength and speed of movement approaching the capabilities of the human limb, combined with more than 80 individual sensory elements for feedback of touch, temperature, and limb position.
"There is still significant work to be done to determine how best to control this number of degrees of freedom, and ultimately how to incorporate sensory feedback based on these sensory inputs within the human nervous system," Harshbarger says. "The APL team is already driving a virtual model of Proto 2 with data recorded during the clinical evaluation of Proto 1, and the team is working to identify a robust set of grasps that can be controlled by a second patient later this year."
Another exciting development is the functional demonstration of Injectable MyoElectric Sensor (IMES) devices--very small injectable or surgically implantable devices used to measure muscle activity at the source verses surface electrodes on the skin that were used during testing of the first prototype.

18:59 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Apr 27, 2007
Evolution of visually guided behavior in artificial agents
Evolution of visually guided behavior in artificial agents.
Network. 2007 Mar;18(1):11-34
Authors: Boots B, Nundy S, Purves D
Recent work on brightness, color, and form has suggested that human visual percepts represent the probable sources of retinal images rather than stimulus features as such. Here we investigate the plausibility of this empirical concept of vision by allowing autonomous agents to evolve in virtual environments based solely on the relative success of their behavior. The responses of evolved agents to visual stimuli indicate that fitness improves as the neural network control systems gradually incorporate the statistical relationship between projected images and behavior appropriate to the sources of the inherently ambiguous images. These results: (1) demonstrate the merits of a wholly empirical strategy of animal vision as a means of contending with the inverse optics problem; (2) argue that the information incorporated into biological visual processing circuitry is the relationship between images and their probable sources; and (3) suggest why human percepts do not map neatly onto physical reality.
13:06 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics
Apr 22, 2007
Seventh International Conference on Epigenetic Robotics
Seventh International Conference on Epigenetic Robotics: Modeling Cognitive Development in Robotic Systems
Call for Papers: Epigenetic Robotics 2007
5-7 November 2007, Piscataway, NJ, USA
Location: Rutgers, The State University of New Jersey, Piscataway, NJ, USA
22:17 Posted in AI & robotics | Permalink | Comments (0) | Tags: artificial intelligence, robotics